Hello, I'm
Monserrat Alvarez
B.S. Computer Engineering
Hello, I'm
B.S. Computer Engineering
Get To Know More
B.S Computer Engineering
UC Davis, June 2024
Coursework: Circuits, Digital Systems, Intro to Computer Architecture, Digital Electronic Circuits, Embedded Systems, Digital Signals & Systems, Computer Networks, Electronic Circuits, Power Electronics, Programming & Problem Solving, Object-Oriented Programming, Data Structures, Operating Systems & System Programming, Algorithm Design & Analysis
Hello, I am Monserrat! I've always had a strong interest in technology and enjoy learning how to build and fix things. This passion led me to pursue a degree in computer engineering. I enjoy working with both hardware and software, and throughout my academic career, I have completed many projects. However, I cannot upload my code for those projects to Github, so I made this website to share demos and pictures of them. I also plan to work on personal projects, which I will add to my Github and website.
In my free time, I like exploring new hobbies. I am currently into: gaming, crocheting, balisong flipping, speed cubing, and mechanical keyboards.
Browse My
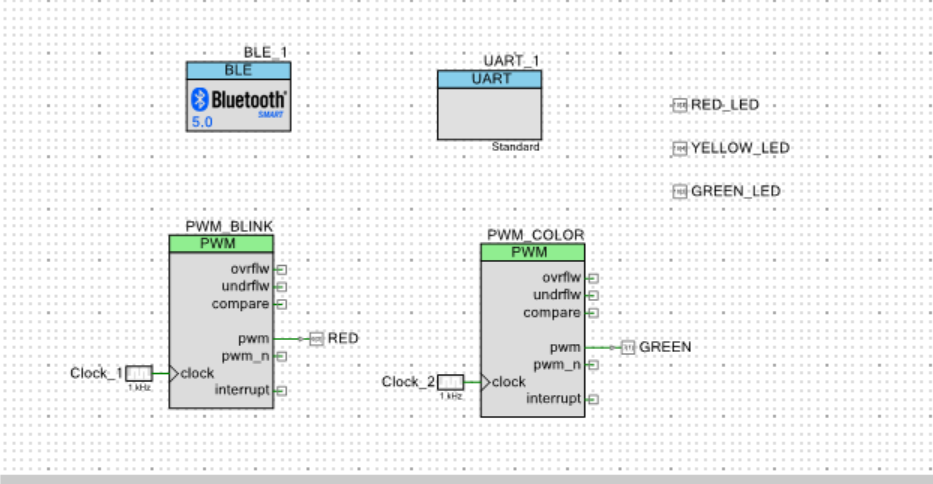
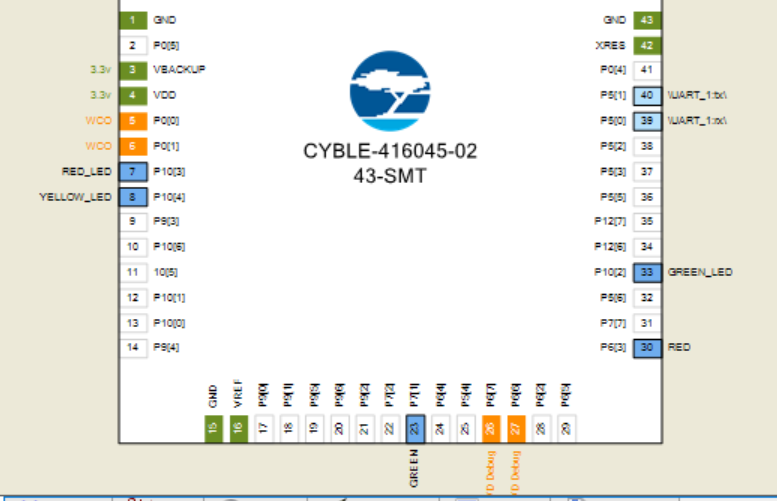
I made a python program to read a player's health in Terraria. The program sends the data to the PSoC6 over UART and turns on different LEDs based on the player's health. The PSoC also allows the user to use the AIROC app to control the LEDs. In the future I would like to implement an LED strip instead of using diodes.
November 2024
Used: PSoC 6 | BLE | Python | C | OpenCV| UART | FreeRTOS
You're on it right now! I made this website to show demos and pictures for some of my projects. Check out my resume if you want to read about my other projects! I had no prior experience with HTML or CSS, so I followed a tutorial. Afterwards, I changed some of the sections and implemented new features such as a dark mode and image sliders.
September 2024 - Present
Used: HTML | CSS | JavaScript
I worked with a team to create a step counter. We used a PSoC microcontroller and LIS3DH acceleromter to detect and calculate movement. For the PSoC and accelerometer to communicate, we used I2C. To power all of the components, we used a battery connected to a buck boost converter to lower the voltage to 3.3V. The step count can be viewed on an app and once ten steps have been reached, a red light on the PSoC turns on.
November 2022
Used: PSoC 6 | PSoC Creator | BLE | I2C | C
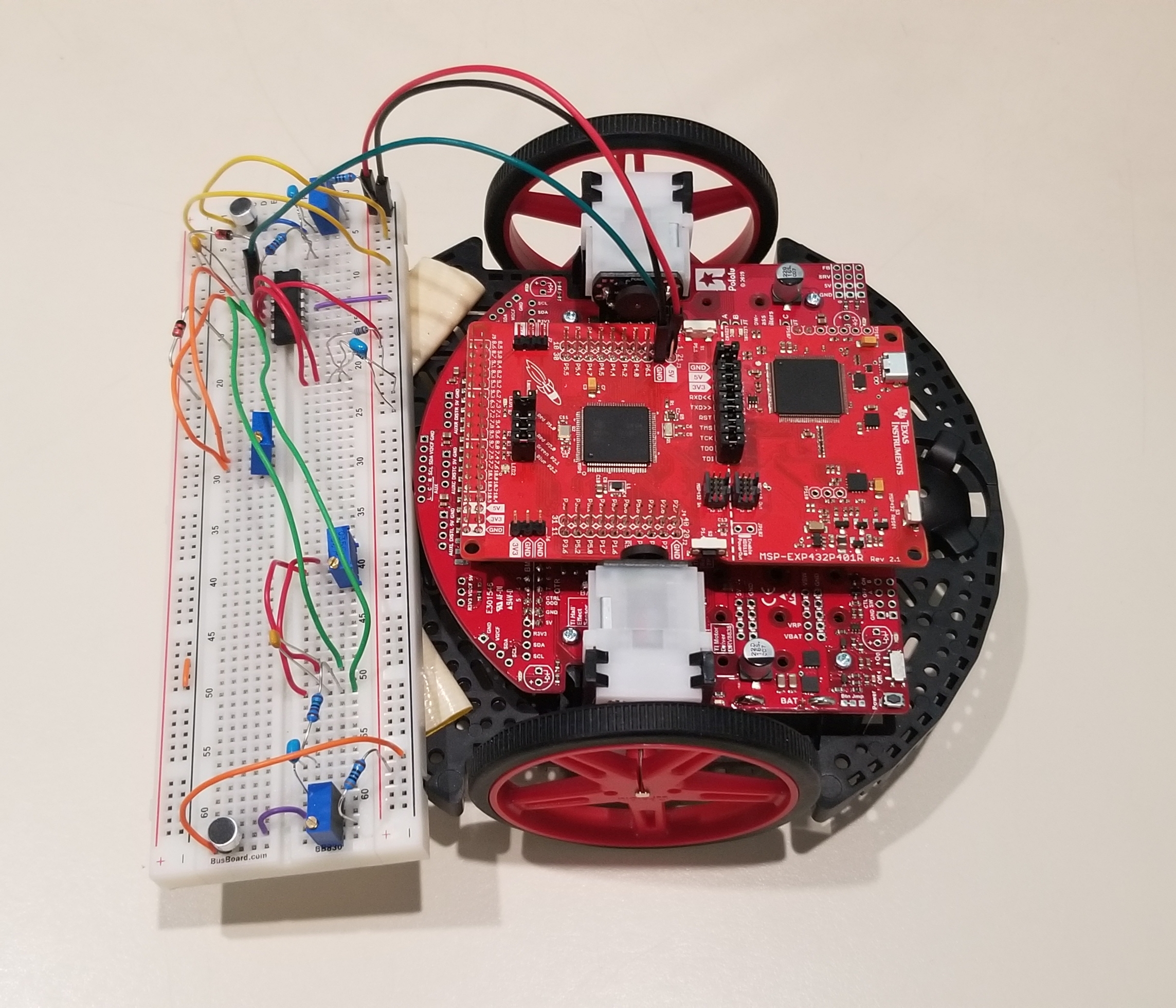
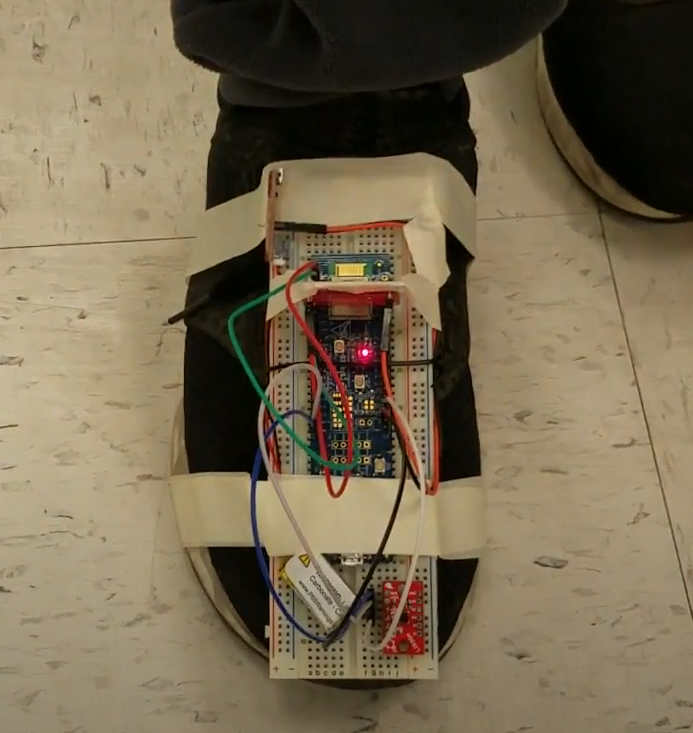
I programmed a robot to move towards sound using a TI MSP432 microcontroller and robotics kit. I built a microphone amplifier circuit and to make sure that the magnitude of the output for both microphone circuits was the same when a sound was played at an equal distance, I used the oscilloscope on myDAQ. I also programmed digital filters to reduce noise, and used PWM to control the robot's motors. To determine which direction the robot should turn, I calculated the average max value of the microphones' output.
June 2021
Used: TI-RSLK Max Kit | Code Composer Studio | C
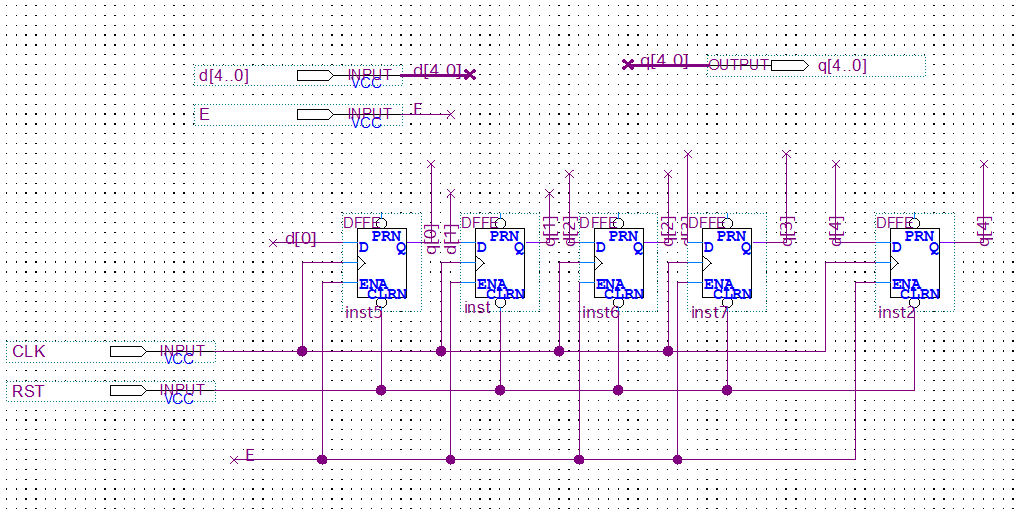
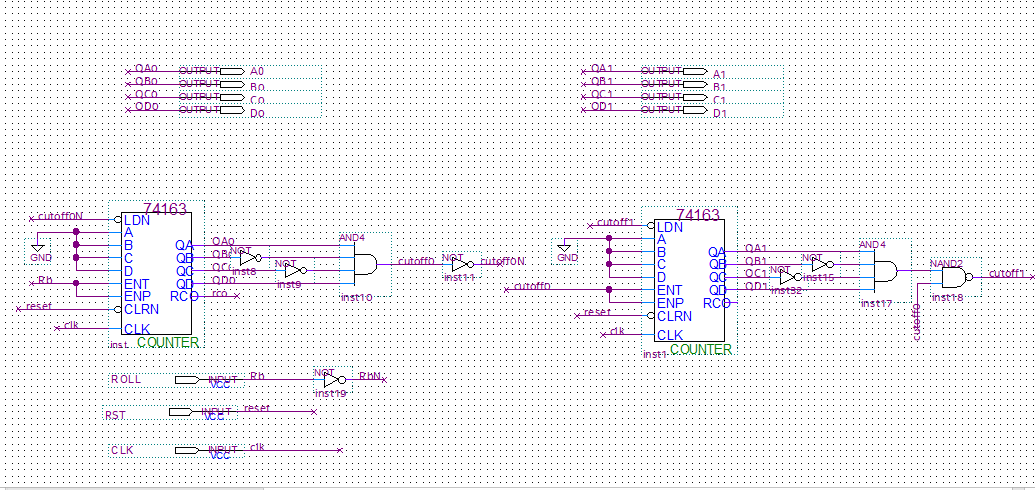
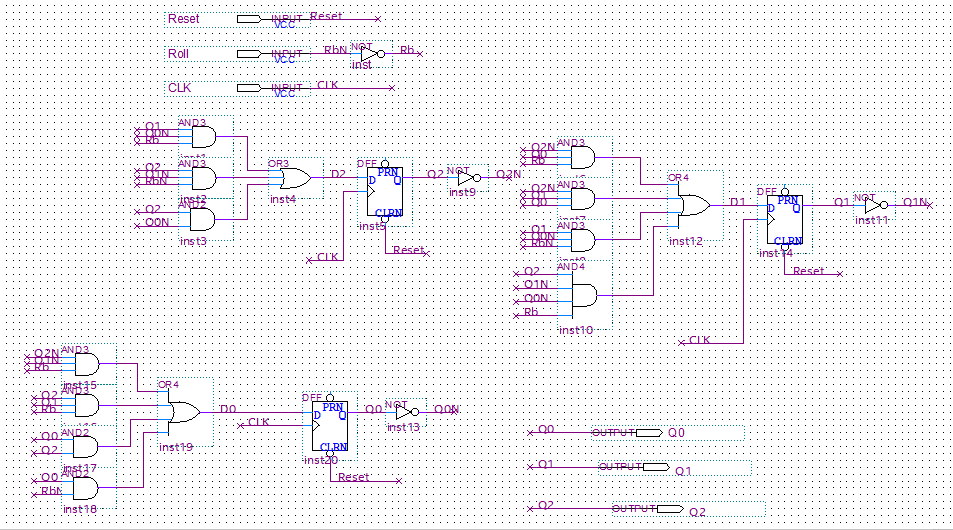
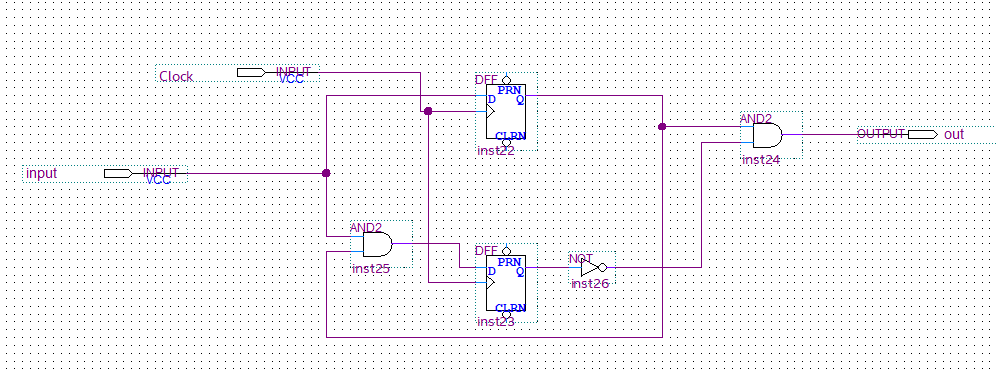
I designed a dice game on the DE10 Lite FPGA board. The goal of the game is to get a score of 15. The player has to roll the dice by pressing a button and use the switches to either add the roll to their score or pass and roll again. I implemented the control logic of the game using the Mealy machine. I also created K-maps for certain components like the 7 segment hex display which shows the decimal value of the player's score and the number they roll. Unfortunately, I did not record a demo.
June 2021
Used: DE10 Lite | Quartus
This project was a kit that my high school physics teacher supplied. The kit came with instructions, so I just soldered the components as directed. This was also my first time soldering and working with electronic components. I really enjoyed building this project, and it solidified my interest in pursuing a computer engineering degree. This robot has two sensors and motors that turn on depending on which sensor detects light. It can also be recharged with a plug in power supply.
May 2019
Explore My
Get in Touch